Correction de l'erreur périodique d'une monture EQ1 avec :
- des rondelles en teflon (prix : 3 ou 4 Euros le sachet)
- un moteur pas à pas d'un lecteur de disquette 5"1/4 avec sa carte contrôleur (prix : récup)
- un moto-réducteur conrad (prix : 15 Euros + 5 Euros de port chez Conrad)
- du contreplaqué de 8mm
- un port parallèle disponible sur le PC

Le moteur d'origine de l'EQ1 est un moteur à courant continu, sa vitesse de rotation est réglable avec un potentiomètre peu précis et varie en fonction de la charge et des frottements (sur l'axe en ascention droite, sur la vis sans fin et entre la vis sans fin et la roue dentée). Il n'y a aucun roulement à billes dans une EQ1, c'est métal contre métal pour la vis sans fin et une rondelle en plastique pour l'AD.
L'erreur de suivi sidéral est alors monstrueux (dans le mauvais sens du terme).
Pour améliorer tout çà, la premičre chose à faire était de démonter l'axe en AD.

|
Pour le guidage en AD: 1 - passer au papier de verre les parties qui sont en frottement quand le frein est serré (il y avait encore de la peinture !). 2 - mettre une épaisseur de teflon (découpés dans des patins en teflon après avoir enlevé la mousse) pour un guidage en rotation (il y a juste la place pour 3/10 mm de chaque coté). |

|
L'axe de la roue dentée en AD: des rondelles en teflon (toujours a partir des patins en teflon decoupés). Celle de droite est collée avec sa mousse sur une rondelle métallique. |
Puis découper dans du contreplaqué un secteur de rayon 140mm et le fixer sur la roue dentée à la place du cercle gradué :

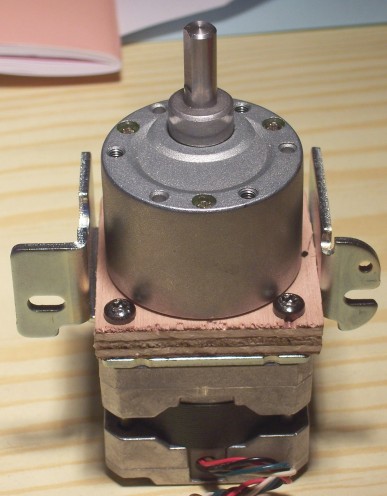
Ensuite, assembler le moteur pas à pas avec le réducteur.
J'ai donc récupéré un moteur et sa carte controleur dans un vieux lecteur de disquette 5"1/4 de PC. C'est l'idéal car on peut le piloter directement a partir de la sortie parallele d'un PC sans aucune électronique supplémentaire (il faut juste faire un cable).
Il faut acheter un réducteur, j'ai pris le même que celui qu'on prend pour les EQ6 : un conrad 1/100.
On récupère le pignon de l'arbre moteur du moto-réducteur conrad en le prenant par dessous avec une pince é dénuder plate et en tapant sur l'axe avec un marteau et un clou par exemple (il faut taper fort et longtemps pour l'avoir).
Il est ensuite collé sur l'arbre du moteur pas à pas avec de l'araldite. (l'arbre a été préalablement coupé à la bonne longueur)

On fixe le support du réducteur sur le moteur par l'intermédiaire d'un carré de contreplaqué.

Puis on visse le réducteur sur son support.
La partie entraînement :
 Le galet fixé sur la sortie du réducteur assure l'entraînement du secteur par l'intermédiaire d'une corde de guitare (le Mi aigu en acier). Il a été découpé sur un flexible qui ne me servait plus.
La tension sur la corde est assurée par un ressort fixé sur le secteur.
Le galet fixé sur la sortie du réducteur assure l'entraînement du secteur par l'intermédiaire d'une corde de guitare (le Mi aigu en acier). Il a été découpé sur un flexible qui ne me servait plus.
La tension sur la corde est assurée par un ressort fixé sur le secteur.La plaque en alu (épaisseur 2mm) qui supporte le réducteur est fixée au même endroit que l'était le support de la vis sans fin. Elle fait aussi office d'amortisseur contre les vibrations (le moteur ne doit rien toucher).
Comme il n'y a pas la place de mettre l'axe sur des paliers, j'ai rajouté une cale avec un tampon en teflon pour contrer la force de réaction de la corde sur l'axe du réducteur.
Le raccordemant électrique du moteur :
Pour la carte contrôleur, on peut faire propre en prenant une nappe de lecteur de disquettes 5"1/4; d'un coté on a le connecteur de lecteur et de l'autre on peut mettre une prise RJ11 femelle (pour y mettre un cable modem).
Les broches utilisées sont :
| port parallèle | carte controleur | signification |
|---|---|---|
| 20 | tout n° impaire | ground (masse) |
| 2 | 20 | step (de 1 à 0 => 1 pas) |
| 3 | 18 | dir (sens de rotation moteur) |
| 12 à la masse | si lecteur B: | |
| (14 à la masse) | (si lecteur A:) | |
| 11 à la masse (20) | ||
| 12 à la masse (20) |

Et ensuite prendre un cable téléphone pour modem en mettant une prise male DB25 à la place de la prise téléphone;

Il faut maintenant alimenter la carte controleur en 5V et 12V, le plus simple est de prendre une alim de PC qui fourni forcément les bonnes tensions (j'ai pris une alim d'un vieux macintosh LC475, elle est petite et a un interrupteur marche/arrêt).

Le programme Hop-Hop Eq.
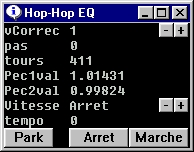
Le programme qui pilote le moteur est fait en C et il fonctionne maintenant sous Windows.
Le principe est de faire passer un signal de 1 à 0 sur la broche "step" du contrôleur pour faire avancer le moteur d'un pas.
Le délai entre 2 pas est calculé en fonction du rapport de réduction secteur+galet, du rapport de réduction du moto-réducteur et du nombre de pas du moteur. Pendant ce délai, la main est redonnée a windows qui attribuera du temps aux autres programmes.
A chaque pas, le temps écoulé depuis la mise en marche est comparé au temps théorique, le delai est la différence entre les deux. Si le programme a pris du retard à cause d'une autre tache effectuée par un autre programme, le delai peut devenir négatif et il prend alors une valeur minimum le temps de rattraper le retard.
On peut donc faire tourner le programme sur le PC qui fait les acquisitions et même utiliser d'autres logiciels sans aucun problème de suivis. Je le fais sur un portable Pentium II 333Mhz (sauf que le disque dur n'est pas assez rapide pour enregistrer des avi en RAW en 5img/s, mais pour les longues poses c'est nickel).
Après un premier test de suivi d'une étoile, il s'est avéré qu'il y avait 2 erreurs périodiques : une avec une période de 36,4s et l'autre de 3640s. La période courte provient du réducteur (36,4s = 1 tour de moteur), la période longue provient des inégalités du galet (3640s = 1 tour du galet).
Le programme gère donc une double correction en faisant varier la valeur du délai en fonction :
- du nombre de pas du moteur pour l'erreur avec une période courte. J'ai utilisé un signal triangulaire, cela fait seulement deux valeurs de correction différentes au lieu de 200.
- du nombre de tour du moteur pour l'erreur avec une période longue.
La détermination de ces valeurs de correction est assez délicate :
1) On enregistre un suivi d'autoguidage avec Iris.
2) on charge les donnés dans un tableur.
3) on ne garde qu'une valeur toutes les 36.4s.
4) on trace une courbe de ces valeurs et on les modifie pour lisser la courbe.
5) on calcule les variations en pixel par tranche de 36.4s (1 tour de moteur pas à pas)
6) on en déduit la correction de vitesse a appliquer au moteur en fonction de la vitesse de dérive d'une étoile moteur arrété : 1/(((dx/36.4)/11.68)+1) (dx=variation en pixel, 11.68=vitesse de dérive d'une étoile moteur arrêté en pixel/s)
7) on mets les 100 valeurs de correction (tour 0 en premier) dans un fichier qui sera chargé par le programme.
Pour faire plus précis, au lieu de prendre 1 valeur toutes les 36.4s, on prend une moyenne des valeurs environnantes et on refait une moyenne sur plusieurs périodes de 3640s. Je fais cela automatiquement avec un programme en C, le code source est inclu dans le .zip mais il est à adapter et à recompiler.
Le progamme, le code source et un exemple de calcul de PEC sous Excel sont disponibles ici : hophopeq.zip.
Voici une mesure sur 2 heures des erreurs de suivi de ma monture sans la correction :
et un zoom sur 1 heure (1 rotation du galet) pour mettre en évidence les 2 erreurs (1 période courte et 1 période longue) :
puis 1/2 heure avec les corrections activées (attention l'échelle a changé):
Pour comparer avec l'ancienne version (roue denté + vis sans fin + poulie + courroie) :
nouvelle version 1200s :
et à la même échelle, ancienne version 1200s :